ISTORIJAT
Istorijat u svetu
| Paralelni
mehanizam je poznat već dugo vremena. Na primer oko
1800. godine matematičar Koši (Cauchy) je
proučavao krutost jednog zglobnog oktaedra. Mnogo bliže
je istraživanje Gouča (Gough) 1949. godine, koji
je koristio sličan paralelni mehanizam za testiranje
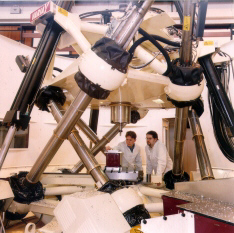
spoljnih guma. Ideja za razvoj mašina sa paralelnom kinematikom potiče od šezdesetih godina prošlog veka. Bilo je potrebno oko 30 godina da bi se ova ideja realizovala. Danas postoje puno različitih konfiguracija mašina, koje su projektovane po ideji koja se zasniva na paralelnom mehanizmu (Stjuartovoj platformi sa šest stepeni slobode). Prvobitno se ovaj mehanizam koristio za simulatore leta. Stjuart (Stewart D.) je još davne 1965. nagovestio mogućnost, da se paralelni mehanizam može koristiti i za nove tipove mašina alatki i automata za montažu. Ilustracija tih prvih ideja je pokazana na slikama.
Opšte rešenje Stjuartove platforme1965
Ideja za primenu kao mašine alatke Prve prave mašine alatke ovog tipa su se pojavile na sajmu IMTS 94 u Čikagu. To su mašine VARIAX firme GIDDINGS&LEWIS, i Hexpaod firme INGERSOLL.
Variax obradni centar Gidding&Lewis, Obradni centar Hexapod - Ingersoll Paralelni mehanizmi su danas već široko zastupljeni u najrazličitijim varijantama. Vodeći istraživački centri imaju projekte o mašinama sa paralelnom kinematikom. Rezultati projekata uglavnom rezultiraju prototipovima mašina, na kojima se vrše dalja istraživanja, mogućnosti, karakteristika i opravdanosti uvođenja mašina sa paralelnom kinematikom. |
Istorijat kod nas
| Pojava mašina alatki i robota sa paralelnom kinematikom ranih devedesetih godina se smatra za najozbiljniji pomak u ovoj oblasti nakon numeričkog upravljanja. Istraživanja u oblasti mašina sa paralelnom kinematikom na Katedri za proizvodno mašinstvo su započela neposredno pre pojave prvih komercijalnih paralelnih mašina na IMTS94 u Čikagu (Variax i Hexapod). Ovo su bila prva istraživanja u ovoj oblasti u našoj zemlji i po obimnom i dugoročnom programu su imala za cilj razvoj nove generacije domaćih mašina alatki i robota. U istraživanja su u samom startu uključene i domaće fabrike na izradiviše simulatora, kao i međunarodna saradnja. Ova problematika je je uključena i u proces nastave na dodiplomskim i poslediplomskim studijama, što je rezultiralo većim brojem urađenih, diplomskih radova, magistarskih teza i doktorskih disertacija. |
|
Prvi objavljeni rad kod nas |
|
CAD modeli u Pro/Engineer okruženju |
|
Prvi fizički modeli |
|
Prva Kooperacija, Mašinski fakultet Beograd - Ivo Lola Ribar |
|
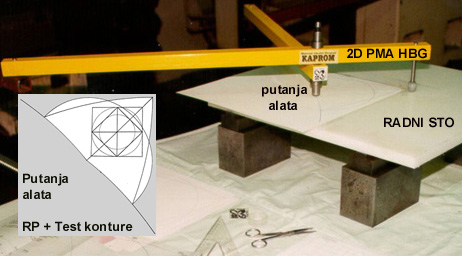
Prvo učilo, Mašinski fakultet Beograd, 2D Tehnološki modul sa paralelnim mehanizmom (iz prve magistarske teze) |
|
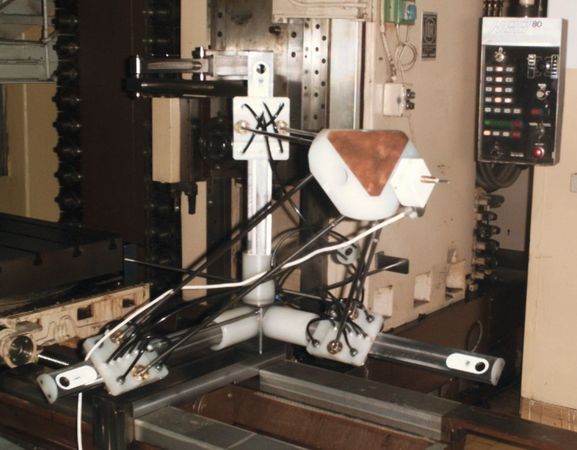
Drugo učilo, Mašinski fakultet Beograd, P3 Funkcionalni simulator (iz prve doktorske disertacije)
PaKiCUT |
CAD model prototipa Troosne paralelne mašine pn101, Mašinski fakultet Beograd-LOLA Sistem
Lola pn101_4 V.1
Lola pn101_4 V.2
|
|
Edukaciona stona troosna mašina sa paralelnom kinematikom pn101_st
Paralelni robot DELTA (Prvi srpski DELTA robot) |
Varijantnost konfiguracija
| Varijantnost konfiguracija mašina sa paralelmom kinematikom može biti posmatrana po više osnova. Prema tome, kako se ostvaruje pomeranje platforme, mašine sa paralelnom kinematikom možemo podeliti u tri grupe: | |
| sa promenljivim dužinama spojki i različitim mogućim rasporedima zglobova na bazi, | |
| sa konstantnim dužinama spojki i pokretnim zglobovima duž aktuatora na bazi, i | |
| sa obrtnim spojkama fiksnih dužina |
![]()
![]()
![]()